This robot was designed and built in the Advanced Digital Systems Laboratory under the guidance of Prof Ricardo Uribe. Its inspiration came from a donation of pneumatic cylinders and the movie Runaway. The robot has been contributed to by several student groups since then and still hangs on the wall in ADSL.
Author: g5mpg
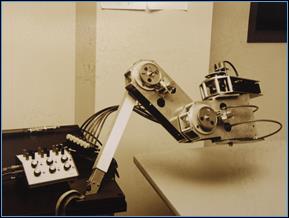
RoboImager

This system was developed to capture images used for 3D Reconstruction by allowing the camera to be rotated around the object while simultaneously collecting images.
Video Track Cart

A method was needed to capture images of the railroad track for automating human track inspection. The base for the cart was found at the Monticello Railroad Museum and was converted rebuilt to provide an autonomous video acquisition system by adding camera mounts, a laptop and a battery for autonomy. | Presentation | Website | […]
First Hexapod Leg Design
This leg design was the first leg design developed for the Hexapod Project. Later much smaller pneumatic cylinders we found and used in the newer designs. This enabled the leg and future body size to be reduced enabling better access for researcher experimentation.
Biobot Robot Sensor Leg
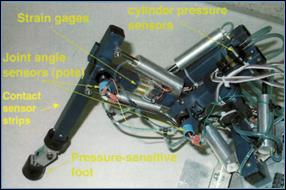
This leg design involved mimicking the leg sensors of an insect (Periplaneta Americana). The information was provided by the entomology department at the University of Illinois. | Poster | Video | Presentation | Website |
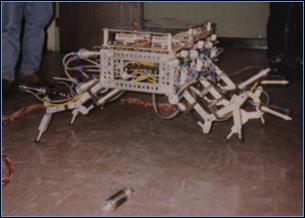
Hexapod Robot Project
This is the first version of the Hexapod Robot called Protobot. This version did not include bearinged joints and a sturdy air hose connections. It also did not have improved wiring incorporated in the second version above. | Poster | Video | Presentation | Website |
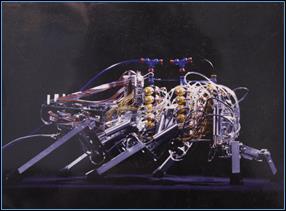
Hexapod Robot Project

This project involved the design and implementation of a biologically inspired robot. This interdisciplinary approach was provided by an interchange of information between the fields of engineering, entomology and neuroscience to develop a walking robot based on an insect. | Poster | Video | Presentation | Website |
Split Aperture Camera Development
This experimental camera was developed to allow several sensors to view the same scene at the same time and from the same viewpoint. It uses a novel optical beam-splitting technique and exposure control method. The camera acquires multiple images under different exposure settings and combines them to construct a high dynamic range composite image.
Multi-Sensor Camera
This experimental camera platform was developed to experiment with a novel beam-splitter using a mirrored pyramid. This enables the image coming in from the lens to be split to multiple sensors. This experimental camera currently has three sensors but is capable of incorporating up to six individually controlled camera boards. | Presentation | Website |Poster|
Nicam Development
Nicam (Non-frontal Imaging Camera) is able to produce 360-degree panoramic images with all objects in focus, regardless of their distance from the camera. These panoramic images are free of the seams seen in traditional large field of view panoramas. In addition, a depth estimate for each visible scene point is also determined. This camera was […]